Reducir la ansiedad por la autonomía del VE y mejorar la seguridad mediante el control integrado del motor FOC y los sensores avanzados
Colaboración de Editores de DigiKey de América del Norte
2022-01-05
Los diseñadores de sistemas para vehículos eléctricos (EV) y vehículos eléctricos híbridos (HEV) (a menudo denominados xEV) están sometidos a una presión constante para ofrecer más kilómetros por carga con el fin de reducir la ansiedad por la autonomía y disminuir la huella de carbono de los vehículos. Al mismo tiempo, necesitan añadir más motores, sensores, componentes electrónicos asociados, procesadores y software para alcanzar niveles más altos de autonomía del vehículo, características del usuario y seguridad, al tiempo que se reducen los costos.
Los motores de las puertas, las ventanas, los ventiladores de la batería, los ventiladores y las bombas del radiador, entre otros, son un tema especialmente espinoso, ya que no sólo añaden peso, sino que requieren algoritmos de control avanzados, como el control orientado al campo (FOC), para minimizar el ruido y el consumo de energía, al tiempo que garantizan una respuesta suave. La tarea global de diseño del sistema se complica por la necesidad de cumplir también los requisitos de seguridad funcional de la norma ISO 26262 y las normas de calidad AEC-Q100.
Para hacer frente a estos desafíos, los diseñadores pueden recurrir a una variedad de dispositivos calificados para el sector de la automoción que ofrecen niveles superiores de hardware y software que simplifican el diseño y la integración de diversas funciones, al tiempo que reducen el número de piezas y el espacio total.
Este artículo analiza los problemas a los que se enfrentan los diseñadores de VE y VEH. A continuación, presenta y muestra cómo utilizar un controlador de motor de corriente continua sin escobillas (BLDC) FOC altamente integrado y una placa de evaluación asociada para poner en marcha un diseño de motor EV/HEV eficiente. También presenta varios sensores para supervisar la corriente, la posición 3D, la velocidad y la dirección, todo ello de una única fuente, Allegro MicroSystems.
El costo, la seguridad y la ansiedad por la autonomía de los vehículos eléctricos
Los diseñadores de xEV deben abordar muchas cuestiones, como el costo del vehículo, la seguridad y la fiabilidad, especialmente a la luz de los crecientes niveles de autonomía de los vehículos, el rango de conducción por carga (ansiedad por la autonomía) y la vida útil del paquete de baterías.
Para respaldar la seguridad y la fiabilidad, se necesitan sensores avanzados que cumplan los requisitos de las funciones de los sistemas avanzados de asistencia al conductor (ADAS) definidos en la norma ISO 26262. Por razones de costo y autonomía, los diseñadores han recurrido a rieles de alimentación de mayor voltaje, de hasta 800 voltios, para lograr una mayor eficiencia y reducir el peso de los cables, al tiempo que aprovechan las mejoras en el diseño de los paquetes de baterías.
Por ejemplo, una mejor gestión térmica de las baterías ha contribuido a aumentar su autonomía y a prolongar su vida útil, mientras que la mejora de la refrigeración de los inversores de tracción de los vehículos eléctricos y de los vehículos eléctricos híbridos contribuye a aumentar las densidades de potencia y energía y a reducir el peso.
Mientras que los mayores niveles de integración de los dispositivos semiconductores están permitiendo una mayor funcionalidad con menos peso y espacio, los motores BLDC necesarios para los ventiladores de refrigeración requeridos deben estar estrechamente controlados para optimizar la eficiencia. Para lograrlo, es útil incluir algoritmos avanzados de control de motores, como el FOC, en el controlador de la puerta del motor.
Refrigeración de alto rendimiento
El FOC permite un funcionamiento suave de los motores eléctricos en toda su gama de velocidades y puede generar todo el par en el arranque. Además, el FOC puede proporcionar una aceleración y desaceleración rápida y suave del motor, una característica que resulta útil para un control preciso en aplicaciones de movimiento de alto rendimiento. El FOC puede utilizarse para desarrollar controladores de bajo voltaje (50 voltios CC e inferiores) de alta eficiencia, compactos y silenciosos para una gama de motores BLDC de alto rendimiento de hasta 500 vatios. Se suelen utilizar en los ventiladores de refrigeración de las baterías de alto voltaje de los vehículos eléctricos, así como en los sopladores de calefacción, ventilación y aire acondicionado, y en las bombas de líquido para los sistemas de refrigeración de los inversores de tracción de alto voltaje (Figura 1).
") Figura 1: Los controladores de motor FOC pueden utilizar la energía de la batería de BT para refrigerar las baterías de AT del xEV y los inversores de tracción de AT. (Fuente de la imagen: Allegro MicroSystems)
Figura 1: Los controladores de motor FOC pueden utilizar la energía de la batería de BT para refrigerar las baterías de AT del xEV y los inversores de tracción de AT. (Fuente de la imagen: Allegro MicroSystems)
En los diseños convencionales, el FOC se implementa con sensores externos utilizando un microcontrolador. Estos diseños, denominados FOC directo, pueden ser complejos y tienden a sufrir una respuesta dinámica reducida debido a su dependencia de sensores externos para medir los parámetros de funcionamiento del motor.
La eliminación de los sensores externos permite obtener un mayor rendimiento y un menor coste.
La información de los sensores que faltan sigue siendo necesaria para implementar el FOC y puede extraerse de las tensiones y corrientes en los terminales del motor a partir de la fuerza electromotriz de retorno (BEMF) en los devanados del motor. Mientras que el hardware es más sencillo, la implementación del FOC sin sensores requiere un software de control más complejo.
Un algoritmo FOC sin sensores puede permitir la mayor eficiencia y respuesta dinámica al tiempo que minimiza el ruido acústico. También proporciona un sólido arranque en lazo abierto para cuando el motor está parado y no hay información de BEMF disponible.
Fácil FOC para ventiladores y bombas de refrigeración de automóviles
Mientras que la mayoría de los controladores FOC BLDC requieren que los desarrolladores de software escriban y porten el algoritmo a un microprocesador o microcontrolador, el A89307KETSR-J de Allegro MicroSystems integra el algoritmo FOC sin sensores directamente en el controlador de puerta. Con solo cinco componentes pasivos externos (cuatro condensadores y una resistencia), el A89307KETSR-J también minimiza la lista de materiales (BOM), mejora la fiabilidad y reduce la complejidad del diseño (Figura 2).
") Figura 2: Un circuito típico de aplicación del ventilador de la batería xEV A89307KETSR-J muestra los cinco componentes externos: cuatro condensadores y una resistencia. (Fuente de la imagen: Allegro MicroSystems)
Figura 2: Un circuito típico de aplicación del ventilador de la batería xEV A89307KETSR-J muestra los cinco componentes externos: cuatro condensadores y una resistencia. (Fuente de la imagen: Allegro MicroSystems)
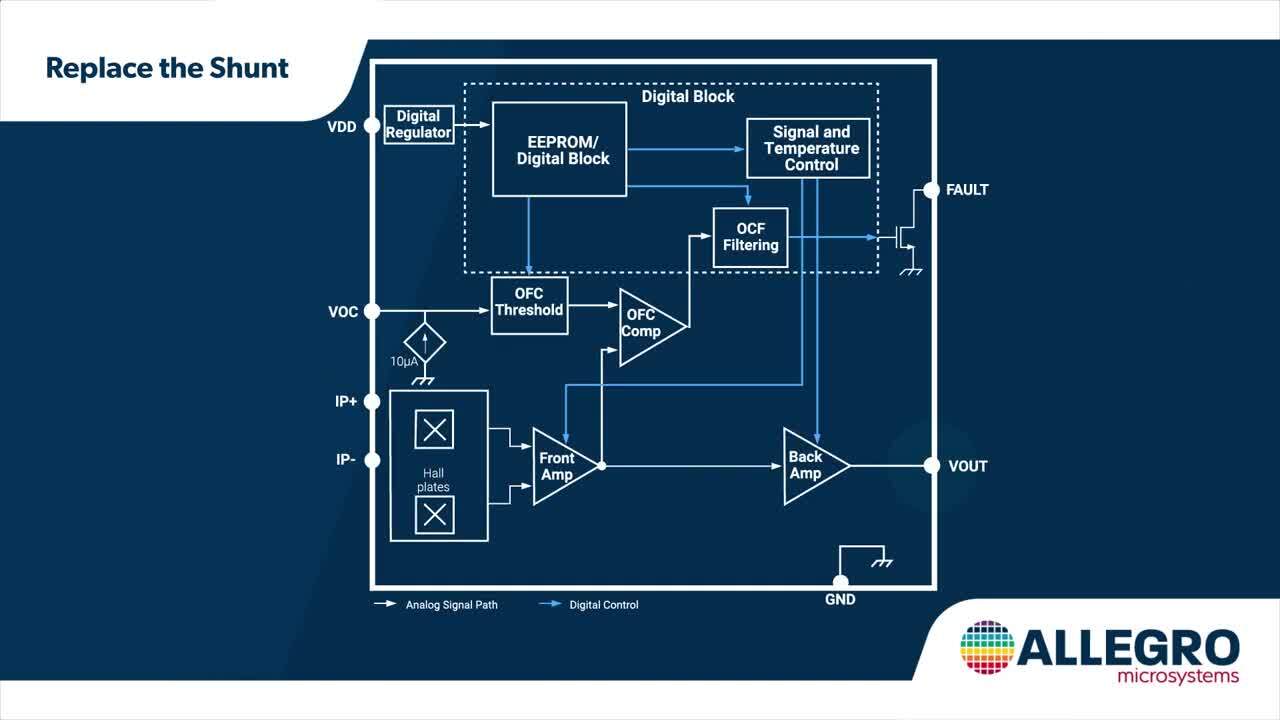
El controlador de puerta A89307KETSR-J funciona de 5.5 a 50 voltios de CC. El algoritmo FOC integrado incluye par y potencia constantes, así como modos de funcionamiento en lazo abierto y velocidad constante. El A89307KETSR-J incluye entradas para el control de la velocidad por modulación de ancho de pulsos (PWM) o en modo reloj, el frenado y la dirección, y señales de salida para las condiciones de fallo y la velocidad del motor (Figura 3).
") Figura 3: El diagrama de bloques interno del A89307KETSR-J muestra el controlador FOC (centro), el control de velocidad PWM o modo reloj (SPD), las entradas de freno (BRAKE) y dirección (DIR) (a la izquierda), y las salidas de fallo (FAULT) y de velocidad del motor (FG) (también a la izquierda). (Imagen: Allegro MicroSystems)
Figura 3: El diagrama de bloques interno del A89307KETSR-J muestra el controlador FOC (centro), el control de velocidad PWM o modo reloj (SPD), las entradas de freno (BRAKE) y dirección (DIR) (a la izquierda), y las salidas de fallo (FAULT) y de velocidad del motor (FG) (también a la izquierda). (Imagen: Allegro MicroSystems)
El A89307KETSR-J está optimizado para accionar MOSFET de potencia de canal N de baja resistencia externos. Puede suministrar los grandes picos de corriente necesarios para encender y apagar rápidamente los MOSFET con el fin de minimizar la disipación de energía durante la conmutación, mejorando la eficiencia operativa y reduciendo los problemas de gestión térmica. Se dispone de varios niveles de accionamiento de la puerta, lo que permite a los diseñadores optimizar el equilibrio entre las emisiones de interferencias electromagnéticas (EMI) y la eficiencia. El encendido rápido de los MOSFET reduce las pérdidas de conmutación, pero aumenta la EMI, mientras que el encendido más lento de los MOSFET reduce la EMI, con la contrapartida de mayores pérdidas de conmutación y menor eficiencia.
La velocidad del motor puede ser controlada a través de la entrada PWM, analógica o CLOCK. El control de la velocidad en bucle cerrado es una opción, con una relación programable entre las revoluciones por minuto (RPM) y la frecuencia del reloj. El control de arranque sin sensores incluye detección y sincronización de prerrotación hacia adelante y hacia atrás (molino de viento), lo que permite que el A89307KETSR-J funcione en una amplia gama de configuraciones de motor y carga.
El algoritmo Non-Reverse Startup de Allegro MicroSystems también mejora el rendimiento del arranque. El motor arrancará en la dirección correcta tras el encendido sin que se produzcan vibraciones o sacudidas en sentido contrario. La función Soft-On-Soft-Off aumenta gradualmente la corriente al motor con la orden de "encendido" (condición de molino de viento) y reduce gradualmente la corriente del motor con la orden de "apagado", reduciendo aún más el ruido acústico (Figura 4).
 Figura 4: Las formas de onda de corriente del A89307KETSR-J para el "encendido" suave (arriba) y el "apagado" suave (abajo) dan como resultado un funcionamiento suave del motor y una reducción del ruido acústico. (Fuente de la imagen: Allegro MicroSystems)
Figura 4: Las formas de onda de corriente del A89307KETSR-J para el "encendido" suave (arriba) y el "apagado" suave (abajo) dan como resultado un funcionamiento suave del motor y una reducción del ruido acústico. (Fuente de la imagen: Allegro MicroSystems)
El A89307KETSR-J incluye una interfaz I2C para configurar la corriente nominal del motor, la tensión, la velocidad, la resistencia y el perfil de arranque. El I2C también implementa el control de encendido/apagado y de velocidad, así como la retroalimentación de velocidad y las señales de fallo.
Placa de evaluación FOC sin sensores
Los diseñadores pueden utilizar la placa de evaluación APEK89307KET-01-T-DK y el software asociado para acelerar el desarrollo de accionamientos de motor BLDC basados en FOC utilizando el A89307KETSR-J (Figura 5). Esta placa incluye el A89307KETSR-J con acceso a todos los pines de entrada y salida, además de una completa etapa de potencia trifásica para accionar un motor BLDC. Los diseñadores pueden seleccionar los parámetros del accionamiento FOC mediante una sencilla interfaz gráfica de usuario (GUI) y cargarlos en la EEPROM del chip. Las necesidades mínimas de la lista de materiales del A89307KETSR-J permiten el diseño de accionamientos que encajan dentro de la carcasa del motor, reduciendo aún más el tamaño de la solución.
 Figura 5: La placa de evaluación APEK89307KET-01-T-DK tiene el A89307KETSR-J (U1, centro izquierdo de la placa) y seis MOSFET de potencia (lado derecho) para accionar un motor BLDC. (Fuente de la imagen: Allegro MicroSystems)
Figura 5: La placa de evaluación APEK89307KET-01-T-DK tiene el A89307KETSR-J (U1, centro izquierdo de la placa) y seis MOSFET de potencia (lado derecho) para accionar un motor BLDC. (Fuente de la imagen: Allegro MicroSystems)
Sensores para ADAS
Los diseñadores de sistemas xEV necesitan detectar los niveles de corriente en los accionamientos de los motores, los convertidores CC-CC y los inversores, así como las posiciones de giro de las válvulas de mariposa y los cilindros, y la velocidad y el sentido de los engranajes en las transmisiones para implementar funciones ADAS compactas y rentables. Allegro MicroSystems ofrece una variedad de soluciones de sensores para ADAS que incluyen:
Detección de corriente: El ACS72981KLRATR-150B3 proporciona a los diseñadores una detección de corriente CA o CC económica y precisa. Este sensor lineal de corriente de efecto Hall de alta precisión tiene un ancho de banda de 250 kilohercios (kHz) y está diseñado para su uso en el control de motores, el control de convertidores CC-CC, el control de inversores y la detección y gestión de cargas. Se trata de un CI calificado AEC-Q100 y tiene un tiempo de respuesta de <2 microsegundos (µs), lo que permite satisfacer las necesidades de detección rápida de fallos de sobrecorriente de las aplicaciones críticas de seguridad.
Detección de posición 3D: La detección de posición magnética 3D sin contacto para la detección de la posición del acelerador, la válvula, el cilindro y la transmisión puede implementarse rápidamente utilizando el CI 3DMAG A31315LOLATR-XY-S-SE-10 de Allegro MicroSystems. El dispositivo puede medir el movimiento de rotación en los planos horizontal y vertical, y medir el movimiento lineal de lado a lado o de delante a atrás (figura 6).
 Figura 6: El sensor de posición 3D A31315LOLATR-XY-S-SE-10 puede medir el movimiento rotatorio en los planos horizontal y vertical, y medir el movimiento lineal de lado a lado o de delante a atrás. (Fuente de la imagen: Allegro MicroSystems)
Figura 6: El sensor de posición 3D A31315LOLATR-XY-S-SE-10 puede medir el movimiento rotatorio en los planos horizontal y vertical, y medir el movimiento lineal de lado a lado o de delante a atrás. (Fuente de la imagen: Allegro MicroSystems)
El sensor A31315LOLATR-XY-S-SE-10 ofrece a los diseñadores la posibilidad de elegir entre formatos de salida analógicos ratiométricos, PWM o de transmisión de nibble de borde único (SENT) SAE J2716. Se ha desarrollado para cumplir la norma ISO 26262 ASIL B (matriz única, en un paquete SOIC-8) y ASIL D (matriz doble redundante, en un paquete TSSOP-14) en los sistemas de seguridad del automóvil.
Velocidad y dirección: El ATS19520LSNBTN-RSWHPYU es un sensor de velocidad y dirección de la transmisión por efecto Hall, tolerante a las vibraciones, con modelos disponibles para la detección de la dirección hacia adelante y hacia atrás (Figura 7).
 Figura 7: La variante "F" mostrada del ATS19520 mide la rotación hacia delante cuando un diente del engranaje pasa del Pin 1 al Pin 3 (arriba), y la rotación inversa cuando un diente del engranaje pasa del Pin 3 al Pin 1 (abajo). La variante "R" mide la rotación en las direcciones opuestas. (Fuente de la imagen: Allegro MicroSystems)
Figura 7: La variante "F" mostrada del ATS19520 mide la rotación hacia delante cuando un diente del engranaje pasa del Pin 1 al Pin 3 (arriba), y la rotación inversa cuando un diente del engranaje pasa del Pin 3 al Pin 1 (abajo). La variante "R" mide la rotación en las direcciones opuestas. (Fuente de la imagen: Allegro MicroSystems)
El sensor con calificación ISO 26262 ASIL B tiene diagnósticos integrados y es adecuado para su uso en trenes de transmisión xEV. El encapsulado de tres pines, de una sola línea (SIP), incluye un imán de polarización posterior integrado para medir la velocidad y la dirección de los objetivos ferrosos en rotación, y un condensador integrado para garantizar la compatibilidad electromagnética.
Conclusión:
Los accionamientos de motor BLDC sin sensores integrados, junto con los sensores de corriente, los sensores de posición magnética y los sensores de rotación, son componentes clave que permiten diseñar xEV eficientes y seguros con mayores rangos de conducción y menor huella de carbono. El uso de accionamientos de motor FOC, en particular, permite el diseño de sistemas de refrigeración más eficientes y silenciosos con una respuesta dinámica mejorada para los paquetes de baterías y los inversores de tracción. Por su parte, los sensores compactos, precisos y energéticamente eficientes son fundamentales para el desarrollo de los xEV que cumplen con las exigencias de fiabilidad de los sistemas avanzados de asistencia al conductor y los requisitos de seguridad funcional de la norma ISO 26262.
Lectura recomendada
Descargo de responsabilidad: Las opiniones, creencias y puntos de vista expresados por los autores o participantes del foro de este sitio web no reflejan necesariamente las opiniones, las creencias y los puntos de vista de DigiKey o de las políticas oficiales de DigiKey.