Cómo adaptar controladores de solenoide e impulsores de motor paso a paso a aplicaciones industriales
Colaboración de Editores de DigiKey de América del Norte
2024-02-07
Aplicaciones de dispositivos de borde, como sistemas de control de fábricas, automoción y equipos de laboratorio, utilizan cada vez más las capacidades de Internet de las cosas (IoT) e inteligencia artificial (IA) para la toma de decisiones con baja latencia, mayor rendimiento, menor costo y mayor seguridad y productividad. Los controladores para solenoides y motores paso a paso deben evolucionar para incorporar más sensores e inteligencia a bordo que faciliten su integración en este entorno en rápida evolución y para mejorar aún más la precisión, la fiabilidad, el control en bucle cerrado, el costo, la huella y la facilidad de uso.
Este artículo resume el funcionamiento básico de los solenoides y los motores paso a paso y expone las ventajas de los CI controladores diseñados para el borde inteligente. A continuación, presenta y explica cómo empezar a diseñar con controladores de muestra de Analog Devices.
Solenoides y motores paso a paso: similares pero diferentes
Los solenoides y los motores paso a paso convierten la corriente eléctrica en movimiento físico mediante una bobina enrollada que actúa como electroimán. A pesar de las diferencias de aspecto y funcionamiento, el hecho de que la bobina sea común permite utilizar el mismo CI controlador para ambos actuadores en algunas circunstancias.
Los solenoides son componentes relativamente sencillos que desarrollan un movimiento mecánico lineal con la corriente aplicada. Constan de una bobina eléctrica enrollada alrededor de un tubo cilíndrico con un actuador ferromagnético (también llamado émbolo o inducido) en el núcleo hueco que es libre de moverse dentro del cuerpo de la bobina (figura 1, izquierda).
En cambio, los motores paso a paso utilizan múltiples bobinas de estator dispuestas alrededor de la circunferencia del cuerpo del motor (Figura 1, derecha). El motor también tiene un conjunto de imanes permanentes acoplados a su rotor.
") Figura 1: La construcción de un solenoide consta de una bobina enrollada con un émbolo deslizante interno (izquierda); los motores paso a paso son más complicados, con imanes permanentes en el rotor y bobinas electromagnéticas dispuestas en el estator (derecha). (Fuentes de las imágenes: Analog Devices, Monolithic Power Systems)
Figura 1: La construcción de un solenoide consta de una bobina enrollada con un émbolo deslizante interno (izquierda); los motores paso a paso son más complicados, con imanes permanentes en el rotor y bobinas electromagnéticas dispuestas en el estator (derecha). (Fuentes de las imágenes: Analog Devices, Monolithic Power Systems)
En el caso de los solenoides, el movimiento del émbolo es un único "golpe" de impacto que se produce cuando se aplica una corriente, golpeando el émbolo hasta su posición extrema. Cuando se retira la alimentación, la mayoría de los solenoides utilizan un muelle para devolver el émbolo a su posición nominal de reposo.
En el esquema de accionamiento más básico, el solenoide se controla mediante un pulso de corriente de encendido/apagado nítido. Aunque es sencillo y directo, sus inconvenientes son la elevada fuerza de impacto, las vibraciones, el ruido acústico y eléctrico, la ineficacia eléctrica y el escaso control sobre la acción del émbolo o su retorno.
La acción de rotación se activa en el motor paso a paso cuando las bobinas del estator se activan en secuencia y el campo magnético giratorio resultante tira de los imanes del inducido. Controlando la secuenciación, se puede hacer que el rotor del motor paso a paso gire de forma continua, se detenga o invierta su sentido.
A diferencia del solenoide, que no tiene consideraciones de temporización, las bobinas del estator deben energizarse secuencialmente y con el ancho de pulso correcto, entre otros atributos.
Los controladores inteligentes superan las limitaciones y mejoran el rendimiento
Controlando cuidadosamente la corriente que impulsa las bobinas de solenoides y motores paso a paso, incluida la forma del perfil de onda, la velocidad de rampa ascendente y descendente y otros parámetros, un controlador inteligente puede proporcionar muchas ventajas, entre ellas:
- Mejora de la suavidad de movimiento y rotación con un mínimo de vibraciones.
- Reducción de vibraciones e impactos, especialmente en solenoides
- Posicionamiento más preciso para el arranque/parada/retroceso del motor paso a paso
- Rendimiento constante y adaptación a condiciones de carga transitorias o variables
- Eficiencia mejorada
- Menos desgaste físico
- Generación de menos ruido acústico y eléctrico
- Facilidad de interconexión con un procesador de supervisión, esencial para las instalaciones de IoT.
El MAX22200 de Analog Devices, un controlador de solenoide y motor integrado y controlado en serie, muestra lo que un sofisticado controlador puede hacer por los solenoides (Figura 2). Los ocho controladores de puente de 1 amperio (A) de este CI de 36 voltios pueden conectarse en paralelo para duplicar la corriente de accionamiento, o configurarse como puentes completos para accionar hasta cuatro válvulas enclavadas (también denominadas válvulas biestables).
") Figura 2: El MAX22200 de Analog Devices es un controlador de motor y solenoide integrado y controlado en serie con ocho controladores de medio puente que pueden disponerse en diferentes configuraciones. (Fuente de la imagen: Analog Devices)
Figura 2: El MAX22200 de Analog Devices es un controlador de motor y solenoide integrado y controlado en serie con ocho controladores de medio puente que pueden disponerse en diferentes configuraciones. (Fuente de la imagen: Analog Devices)
Este controlador admite dos métodos de control: regulación del voltaje (VDR) y regulación de la corriente (CDR). Con VDR, el dispositivo emite un voltaje modulado por ancho de pulsos (PWM) en el que el ciclo de trabajo se programa utilizando su Interfaz periférica serial (SPI). La corriente de salida es proporcional al ciclo de trabajo programado para un voltaje de alimentación y una resistencia/resistencia de solenoide determinados. CDR es una forma de control en bucle cerrado en la que un circuito integrado de detección de corriente sin pérdidas detecta la corriente de salida y la compara con una corriente de referencia interna programable.
A diferencia de un controlador de fuente de corriente simplista, el MAX22200 permite personalizar el perfil de accionamiento de corriente. Para optimizar la gestión de la potencia en aplicaciones de accionamiento de solenoides, el nivel de accionamiento de excitación (IHIT), el nivel de accionamiento de retención (IHOLD) y el tiempo de accionamiento de excitación (tHIT) pueden configurarse individualmente para cada canal. También ofrece múltiples características de protección y relacionadas con los fallos, entre las que se incluyen:
- Protección contra sobrecorriente (OCP)
- Detección de carga abierta (OL)
- Apagado térmico (TSD)
- Bloqueo de subvoltaje (UVLO)
- Verificación de la detección del movimiento del émbolo (DPM)
Las cuatro primeras características son estándar y bien conocidas. DPM requiere más explicaciones. Por ejemplo, si la válvula funciona correctamente cuando se activa el solenoide en una válvula controlada por solenoide, el perfil de corriente no es monotónico (Figura 3, curva negra). En cambio, muestra una caída debida a la fuerza electromotriz de retroceso (BEMF) generada por el movimiento del émbolo (Figura 3, curva azul).
 Figura 3: Al accionar un solenoide, el MAX22200 puede detectar un solenoide o una válvula atascados buscando la caída de corriente impulsada por BEMF esperada frente al valor umbral (IDPM_TH) a medida que se acciona el solenoide desde la corriente de arranque (ISTART) hasta el nivel de accionamiento de excitación final (IHIT). (Fuente de la imagen: Analog Devices).
Figura 3: Al accionar un solenoide, el MAX22200 puede detectar un solenoide o una válvula atascados buscando la caída de corriente impulsada por BEMF esperada frente al valor umbral (IDPM_TH) a medida que se acciona el solenoide desde la corriente de arranque (ISTART) hasta el nivel de accionamiento de excitación final (IHIT). (Fuente de la imagen: Analog Devices).
Cuando se configura y utiliza para solenoides, la función DPM del MAX22200 detecta la presencia de la caída de BEMF durante la fase de excitación. Si no se detecta la caída, se establece una indicación en la clavija FAULT y en el registro interno de fallos.
Los kits de evaluación facilitan el proceso
Para resolver los problemas relacionados con el rendimiento del sistema en diferentes condiciones de carga y demandas estáticas y dinámicas, Analog Devices ofrece la placa de evaluación de gestión de alimentación de control de solenoides MAX22200EVKIT# para el MAX22200 (figura 4). Este kit de evaluación (EVK) permite el control en serie del MAX22200 y la supervisión de fallos mediante una interfaz USB a SPI integrada a través de un microcontrolador MAX32625. Incluye una interfaz gráfica de usuario (GUI) compatible con Windows para ejercitar las características del CI MAX22200, lo que lo convierte en un completo sistema de evaluación basado en PC.
 Figura 4: La placa de evaluación de gestión de alimentación de control de solenoides MAX22200EVKIT# para el MAX22200 facilita el ejercicio completo del CI y su carga mediante una interfaz gráfica de usuario basada en Windows. (Fuente de la imagen: Analog Devices).
Figura 4: La placa de evaluación de gestión de alimentación de control de solenoides MAX22200EVKIT# para el MAX22200 facilita el ejercicio completo del CI y su carga mediante una interfaz gráfica de usuario basada en Windows. (Fuente de la imagen: Analog Devices).
Esta placa totalmente ensamblada y probada se puede configurar como solenoide de lado alto/lado bajo, y para válvulas enclavadas (a menudo accionadas por solenoides) o motores de CC con escobillas.
Motores paso a paso: más grados de libertad para controlar
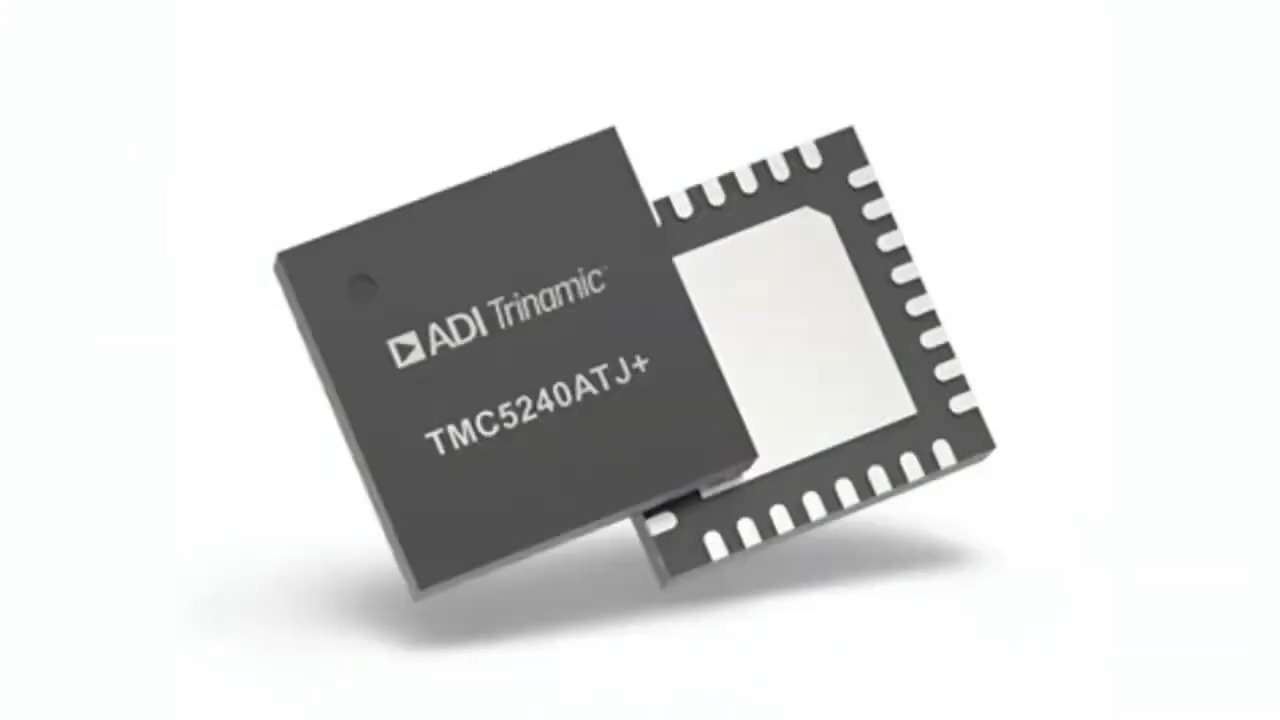
Los motores paso a paso son más complicados que los solenoides y tienen más requisitos de control. Esto se aprecia en las características del TMC5240 de Analog Devices (Figura 5), un CI de controlador e impulsor de motor paso a paso integrado y de alto rendimiento con interfaces de comunicación serial (SPI, UART), amplias capacidades de diagnóstico y algoritmos integrados.
") Figura 5: El CI controlador y excitador de motor paso a paso de alto rendimiento TMC5240 incorpora sofisticados algoritmos para ofrecer un rendimiento óptimo con solenoides y motores paso a paso. (Fuente de la imagen: Analog Devices)
Figura 5: El CI controlador y excitador de motor paso a paso de alto rendimiento TMC5240 incorpora sofisticados algoritmos para ofrecer un rendimiento óptimo con solenoides y motores paso a paso. (Fuente de la imagen: Analog Devices)
Este CI combina un generador de rampa flexible de ocho puntos para un mínimo tirón en el posicionamiento automático del objetivo. El tirón es la velocidad de cambio de la aceleración y un tirón excesivo puede causar muchos problemas en el sistema y en el rendimiento. Este controlador de motor paso a paso integra puentes H de 36 voltios y 3 A con resistencia en estado encendido de 0.23 ohmios (Ω) y detección de corriente integrada no disipativa (ICS). El TMC5240 está disponible en un pequeño paquete TQFN32 de 5 × 5 milímetros (mm) y en un paquete TSSOP38 optimizado térmicamente de 9.7 × 4.4 mm con placa descubierta.
El TMC5240 implementa características únicas y avanzadas que permiten una mayor precisión, alta eficiencia energética, alta fiabilidad, movimiento suave y funcionamiento frío. Estas características incluyen:
- StealthChop2: un algoritmo de chopper silencioso y de alta precisión para el movimiento y la parada inaudibles del motor, que permite una aceleración y deceleración del motor más rápidas que el StealthChop más sencillo.
- SpreadCycle: Control de intensidad ciclo a ciclo de alta precisión para los movimientos más dinámicos
- StallGuard2: Proporciona detección de calado sin sensores y medición de carga mecánica para SpreadCycle.
- StallGuard4: ofrece detección de entrada en pérdida sin sensores y medición de la carga mecánica para StealthChop.
- CoolStep: Utiliza la medición de StallGuard para adaptar la corriente del motor para obtener la mejor eficiencia y el menor calentamiento del motor y el controlador.
Estas características pueden preconfigurarse e invocarse durante el ciclo de funcionamiento del motor. Además, el par de torsión puede controlarse junto con la aceleración para desarrollar el valor deseado al tiempo que se proporciona una aceleración y deceleración eficientes y suaves.
Por ejemplo, un juego de tres segmentos de aceleración y deceleración puede utilizarse de dos formas: para la adaptación a la curva de torsión del motor utilizando valores de aceleración más altos a una velocidad más baja o para reducir la sacudida al pasar de un segmento de aceleración al siguiente. Para solucionar ambos problemas, el generador de perfiles de movimiento de ocho puntos del TMC5240 permite al controlador mantener un segmento de velocidad constante mientras la posición deseada del objetivo cambia en tiempo real, lo que da lugar a transferencias en modo sin obstáculos (Figura 6).
") Figura 6: El TMC5240 ofrece una rampa de ocho puntos que admite el cambio de posición del objetivo sobre la marcha, lo que da lugar a transferencias en modo sin obstáculos. (Fuente de la imagen: Analog Devices)
Figura 6: El TMC5240 ofrece una rampa de ocho puntos que admite el cambio de posición del objetivo sobre la marcha, lo que da lugar a transferencias en modo sin obstáculos. (Fuente de la imagen: Analog Devices)
Dada la flexibilidad, versatilidad y complejidad de este CI controlador, la placa de evaluación TMC5240-EVAL es un complemento muy útil (Figura 7). Utiliza el diagrama esquemático estándar del CI y ofrece varias opciones en su software, lo que permite a los diseñadores probar distintos modos de funcionamiento.
 Figura 7: Mediante la placa de evaluación TMC5240-EVAL y la interfaz gráfica de usuario asociada, los diseñadores pueden investigar y ajustar el rendimiento del TMC5240 a su combinación específica de actuador y carga. (Fuente de la imagen: Analog Devices).
Figura 7: Mediante la placa de evaluación TMC5240-EVAL y la interfaz gráfica de usuario asociada, los diseñadores pueden investigar y ajustar el rendimiento del TMC5240 a su combinación específica de actuador y carga. (Fuente de la imagen: Analog Devices).
Para los diseñadores con requisitos de evaluación y diseño menos complejos, Analog Devices también ofrece el TMC5240-BOB. Esta placa básica de CI lleva las conexiones físicas de los pines del TMC5240 a filas de cabeceras accesibles para el usuario.
Conclusión:
Añadir inteligencia a los controladores de solenoides e impulsores de motor paso a paso proporciona un mejor control y detección de fallos, permite tomar decisiones en tiempo real y permite la comunicación con sistemas de control de nivel superior o de productividad basados en IA. Los controladores altamente integrados, como el MAX22200 y el TMC5240 de Analog Devices, permiten a los usuarios ponerse en marcha rápidamente con algoritmos avanzados para optimizar el rendimiento de solenoides e impulsores de motor paso a paso para su aplicación.
Descargo de responsabilidad: Las opiniones, creencias y puntos de vista expresados por los autores o participantes del foro de este sitio web no reflejan necesariamente las opiniones, las creencias y los puntos de vista de DigiKey o de las políticas oficiales de DigiKey.