Cómo pueden utilizar las pymes un metaverso industrial para explorar e implantar rápidamente soluciones robóticas
Colaboración de Editores de DigiKey de América del Norte
2024-11-21
Los robots y los robots colaborativos (cobots) están a la vanguardia de las tecnologías de automatización de fábricas. Los gemelos digitales y la realidad virtual (RV) están a la vanguardia de las herramientas de diseño y desarrollo. Al combinarse, pueden aprovecharse para crear un metaverso industrial que ofrezca una mayor productividad con mayor rapidez, incluso para las pequeñas y medianas empresas (PYME).
Los diseñadores de las PYME pueden beneficiarse de una interfaz sencilla e intuitiva que combina un gemelo digital, un modelo virtual muy detallado de un objeto físico como un robot delta, lineal o multieje, y un entorno de RV tridimensional (3D) para permitir la ejecución directa y la comprobación de las secuencias de movimiento del robot.
El uso de estas características admite el ajuste fino y la optimización del sistema de automatización incluso sin hardware físico y permite explorar rápidamente múltiples posibilidades de solución.
Este artículo examina en primer lugar la distinción entre un gemelo digital matemático, descrito a partir de datos, y un gemelo digital visual (gemelo de RV), y cómo ambos son necesarios para crear el metaverso industrial. A continuación, presenta un sistema de control de robots y el software relacionado de Igus que puede utilizarse para simular un robot en una interfaz 3D (gemelo digital visual) sin utilizar ningún hardware físico, junto con robots delta, lineales y multieje compatibles que pueden utilizarse para realizar la solución optimizada.
Los gemelos digitales y la RV son tecnologías complementarias que utilizan diferentes formas de visualización, interacciones y hardware. Los gemelos digitales son modelos basados en datos de objetos, sistemas o procesos físicos. Están diseñados para ser utilizados a lo largo de todo el ciclo de vida del objeto modelado, desde su concepción inicial hasta su desmantelamiento y reciclaje.
La RV es una tecnología inmersiva y visual que también utiliza modelos digitales. En un entorno de RV, es posible simular las relaciones e interacciones entre objetos, como un robot realizando una tarea. Así, aunque ambas tecnologías pueden utilizarse para el diseño y la simulación, la tecnología de gemelos digitales se centra en las consideraciones generales del ciclo de vida, y la RV se centra en las interacciones entre objetos físicos.
Un metaverso combina los gemelos digitales y la RV en un entorno virtual creado a tal efecto que permite interacciones en tiempo real entre los objetos digitales y las personas. Suele asociarse a los juegos, pero cada vez se aplica más a actividades empresariales e industriales.
Bienvenido al iguverso
Igus ha desarrollado el metaverso iguverse para apoyar las interacciones de ingeniería en entornos industriales, como el desarrollo y despliegue de sistemas robóticos. El iguverso puede implementarse mediante el software Igus Robot Control (iRC). Esta aplicación gratuita y sin licencia permite a los usuarios controlar varios tipos de robots, incluidos robots delta, cobots (brazos robóticos) y robots de pórtico.
Ofrece a los usuarios una interfaz 3D y más de 100 programas de ejemplo. Los requisitos del sistema para implementar iRC incluyen un PC (mínimo una CPU Intel i5) con Windows 10 u 11 (64 bits) con 500 MB de espacio libre en disco y conectividad de red Ethernet o inalámbrica.
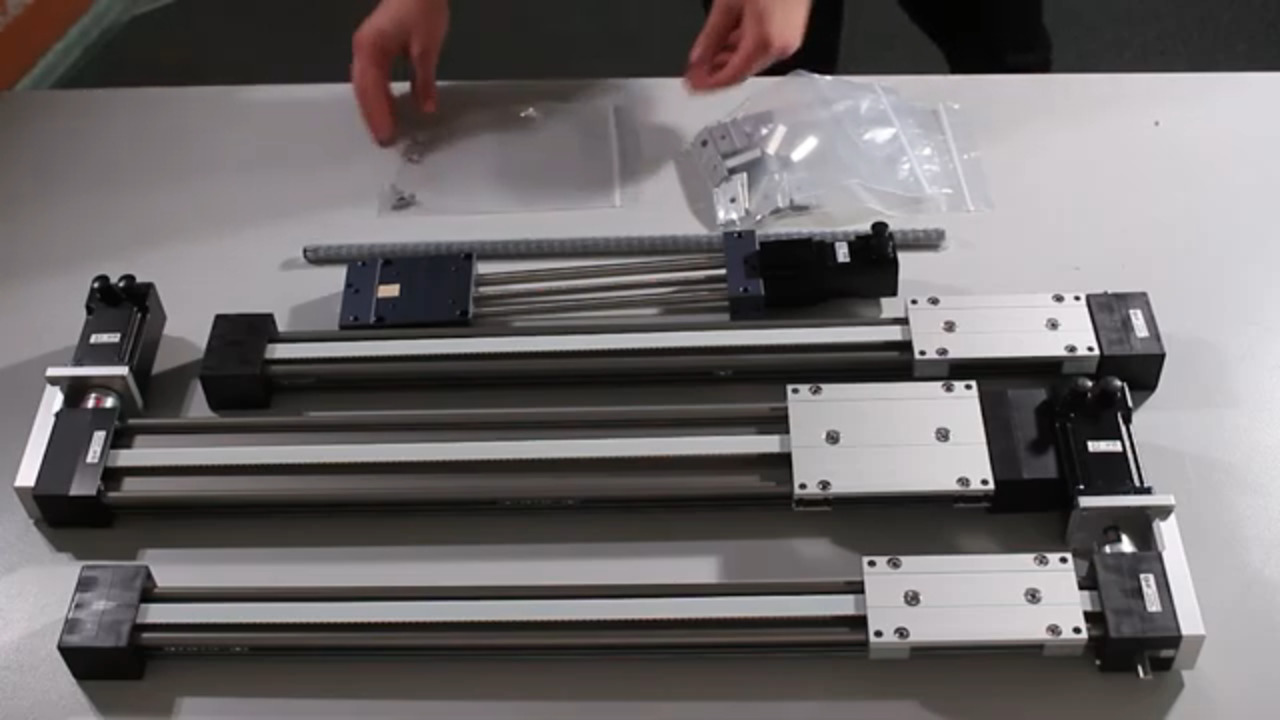
El núcleo del software es un gemelo digital en 3D del robot que se está programando. Un ejemplo de ello es un robot de pórtico lineal de tres ejes como el modelo DLE-RG-0001-CA-500-500-100 con un espacio de trabajo de 500 x 500 x 100 mm o un actuador xy de dos ejes como el modelo DLE-LG-0012-CA-800-500 con un espacio de trabajo de 800 x 500 mm (Figura 1). Los diseñadores pueden definir los movimientos con unos pocos clics de mouse y utilizar el modelo 3D para asegurarse de que los movimientos requeridos son factibles, incluso antes de comprar el robot.
 Figura 1: Ejemplo de un gemelo digital 3D VR de un robot pórtico de tres ejes en el iguverso. (Fuente de la imagen: Igus)
Figura 1: Ejemplo de un gemelo digital 3D VR de un robot pórtico de tres ejes en el iguverso. (Fuente de la imagen: Igus)
Además del software iRC, el controlador del robot es un elemento clave del entorno de desarrollo del iguverso. Por ejemplo, el modelo IRC-LG12-02000 es para motores de 48 V, tiene siete entradas y siete salidas, y dispone de un cable de 10 m para conectarlo al robot. Los controladores IRC incluyen módulos de accionamiento de motor para varios tamaños de motores paso a paso bipolares y están disponibles configurables o preconfigurados. También dispone de varias interfaces para la integración de sistemas, entre ellas:
- Interfaz de controladores lógicos programables (PLC) para el control a través de las entradas y salidas digitales, especialmente para facilitar el inicio y la detención de programas mediante un PLC o un pulsador.
- Interfaz Modbus TCP para controladores lógicos programables (PLC) o PC
- Interfaz robótica común (CRI) Ethernet para el control y la configuración mediante PLC o PC
- Interfaz del Sistema Operativo del Robot (ROS) para manejar el robot mediante ROS
- Interfaz para cámaras de detección de objetos
- Interfaz en la nube para supervisar a distancia el estado del robot
Cinemática soportada
En el iguverso, se admiten diversas cinemáticas (movimientos básicos) que definen el movimiento controlado del robot. Además de la cinemática preconfigurada, en el IRC pueden configurarse hasta tres ejes cinemáticos independientes más. La cinemática preconfigurada incluye:
- Robots delta de 2 y 3 ejes
- Robots Gantry,
- 2 ejes (ejes X e Y)
- 2 ejes (ejes Y y Z)
- 3 ejes (ejes X, Y y Z)
- Brazos robóticos (cobots),
- 3 ejes (ejes 1, 2, 3)
- 3 ejes (ejes 2, 3, 4)
- 4 ejes (ejes 1, 2, 3, 4)
- 4 ejes (ejes 2, 3, 4, 5)
- 5 ejes (ejes 1 a 5)
- 6 ejes (ejes 1 a 6)
- Robot SCARA de 4 ejes
Programación sencilla para una automatización de bajo coste
Los robots Igus y el IRC están diseñados para facilitar la automatización a bajo coste. Eso no sería posible sin una interfaz de programación fácil de usar. Un ratón de 3 botones o un gamepad pueden mover y colocar un robot en el iguverso. Con el software IRC, el usuario puede mover libremente todos los ejes del gemelo digital en la interfaz 3D. Una función teach-in permite desarrollar software de control de robots, incluso sin que haya un robot físico conectado.
Para poner en práctica el aprendizaje, el usuario mueve manualmente el robot virtual hasta la posición deseada y define cómo se desplaza hasta ella. El proceso se repite hasta que se haya creado el perfil de movimiento completo. El centro de herramientas del software IRC permite a los usuarios añadir efectores finales coincidentes, como pinzas, de forma sencilla y ajusta automáticamente el punto central de la herramienta en el robot. Además, puede añadirse una conexión a un sistema de control industrial de nivel superior.
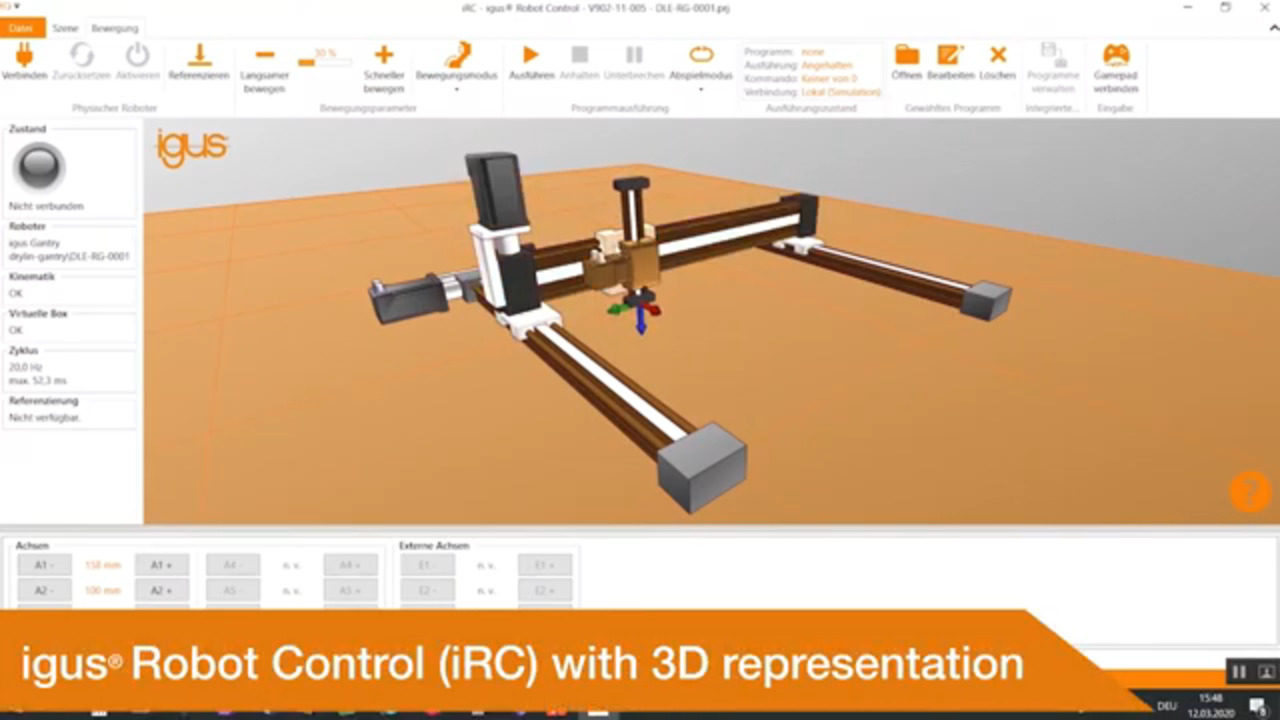
El proceso comienza activando el robot mediante los botones "conectar", "reiniciar" y "habilitar" según sea necesario en la interfaz. El LED de estado en el IRC debe volverse verde, y el estado debe indicar "Sin Error". Ahora puede introducirse el perfil de movimiento mediante la lengüeta "Jogging" (Figura 2).
 in the iguverse immersive development environment (click to enlarge)") Figura 2: La lengüeta "Jogging" (abajo a la izquierda) del entorno de desarrollo inmersivo iguverse puede utilizarse para introducir perfiles de movimiento. (Fuente de la imagen: Igus)
Figura 2: La lengüeta "Jogging" (abajo a la izquierda) del entorno de desarrollo inmersivo iguverse puede utilizarse para introducir perfiles de movimiento. (Fuente de la imagen: Igus)
Robots pórtico
Los robots de pórtico, como los incluidos en los ejemplos anteriores del iguverse, constan de dos ejes X de base, un eje Y y un eje Z opcional. El eje Y está unido a los dos ejes X paralelos y se mueve hacia delante y hacia atrás en el espacio bidimensional. El eje Z opcional admite una tercera dimensión de movimiento.
Los robots de pórtico de Igus tienen revestimientos de plástico autolubricantes que se deslizan y ruedan de forma más suave y silenciosa que los diseños tradicionales basados en rodamientos de bolas. El nuevo diseño es más ligero, resistente a la corrosión y libre de mantenimiento, cualidades importantes para las PYME. Estos robots, cruciales también para las PYME, cuestan hasta un 40% menos que los robots de pórtico tradicionales, lo que proporciona un rendimiento de la inversión (ROI) más rápido.
Estos robots son adecuados para dos clases de aplicaciones: velocidades bajas con cargas altas o velocidades altas con cargas bajas. Aplicaciones representativas incluyen operaciones de envasado, recogida y colocación, etiquetado, manipulación de materiales y ensamblaje.
Se ofrecen en varios tamaños. Los accesorios disponibles incluyen acoplamientos, efectores finales y bridas de motor. Algunos ejemplos de robots de pórtico de tamaño medio son
- DLE-FG-0006-CA-650-650 es un pórtico plano bidimensional con un espacio de trabajo de 650 x 650 mm. Este robot puede manipular cargas útiles de hasta 8 kg y tiene una velocidad dinámica de hasta 20 recogidas por minuto.
- DLE-RG-0012-CA-800-800-500 es un pórtico tridimensional con un espacio de trabajo de 800 x 800 x 500 mm. Puede manipular cargas útiles de hasta 10 kg con una velocidad dinámica de hasta 20 recogidas por minuto.
Destreza paletizadora
El paletizado de productos para su envío es una actividad cotidiana en las operaciones de fabricación y logística. El miembro más nuevo y más grande del iguverse es el robot de pórtico grande XXL con un espacio de trabajo de 2.000 x 2.000 x 1.500 mm, muy adecuado para aplicaciones de paletizado de hasta 10 kg. Hay disponibles diseños personalizados con espacios de trabajo de hasta 6.000 x 6.000 x 1.500 mm.
Estos robots de pórtico pueden recoger piezas de hasta 10 kg de peso, transportarlas a una velocidad de hasta 500 mm/s y colocarlas en un palet con una repetibilidad de 0,8 mm (Figura 3). La solución de robot paletizador de Igus cuesta hasta un 60% menos que los sistemas comparables.
 Figura 3: El paletizado es una actividad común e importante en las operaciones de fabricación y logística, y puede automatizarse utilizando un robot de pórtico. (Fuente de la imagen: Igus)
Figura 3: El paletizado es una actividad común e importante en las operaciones de fabricación y logística, y puede automatizarse utilizando un robot de pórtico. (Fuente de la imagen: Igus)
Robots Delta
Al igual que los robots de pórtico, los robots delta están disponibles con dos o tres ejes. Los robots Delta tienen una funda de trabajo en forma de cúpula montada sobre el espacio de trabajo. Tienen velocidades excepcionalmente altas y suelen utilizarse para la manipulación de materiales y la colocación de piezas. Algunos ejemplos de robots delta de Igus son:
- RBTX-IGUS-0047 es un diseño de tres ejes con un diámetro de espacio de trabajo de 660 mm. Tiene una precisión de ±0,5 mm, una carga útil máxima de 5 kg, una velocidad máxima de 0,7 m/s y puede realizar hasta 30 picks por minuto. (Figura 4).
- RBTX-IGUS-0059 es un diseño de 2 ejes con un diámetro de espacio de trabajo de 700 mm. También tiene una precisión de ±0,5 mm. Su carga útil máxima es de 5 kg, su velocidad máxima es de 2 m/s y puede realizar hasta 50 recogidas por minuto.
 Figura 4: Ejemplo de un robot delta de tres ejes junto a un iRC de Igus (izquierda). (Fuente de la imagen: DigiKey)
Figura 4: Ejemplo de un robot delta de tres ejes junto a un iRC de Igus (izquierda). (Fuente de la imagen: DigiKey)
Cobots de brazo articulado
El iguverse también admite cobots de brazo articulado. Los cobots pueden tener de dos a 10 o más ejes, también llamados grados de libertad (DOF). Suelen tener una gran funda de trabajo y pueden realizar tareas complejas en colaboración con una persona. El modelo REBEL-6DOF-02 de Igus tiene 6 DOF y el modelo REBEL-4DOF-02 tiene 4 DOF. Ambas tienen una precisión de ±1 mm, un rango de trabajo nominal de 400 mm y pueden realizar un mínimo de 7 recogidas por minuto con una velocidad lineal de 200 mm/s.
El modelo de 6 DOF tiene una carga útil máxima de 2 kg y un alcance máximo de 664 mm. El modelo de 4 DOF tiene una carga útil máxima de 3 kg y un alcance máximo de 495 mm (Figura 5).
 and 6 DOF (right)") Figura 5: Cobots de brazo articulado con 4 DOF (izquierda) y 6 DOF (derecha). (Fuente de la imagen: Igus)
Figura 5: Cobots de brazo articulado con 4 DOF (izquierda) y 6 DOF (derecha). (Fuente de la imagen: Igus)
Resumen
El metaverso industrial inmersivo iguverse combina gemelos digitales y RV para proporcionar herramientas que permitan un rápido desarrollo e implantación de soluciones robóticas. Es gratuito, no requiere licencia y está diseñado para ejecutarse localmente en un PC sin conexión a la nube. Puede utilizarse para desarrollar y probar soluciones robóticas sin la presencia de un robot.
TI admite un amplio rango de cinemáticas en robots delta, robots de pórtico, brazos robóticos (cobots) y robots SCARA. El IRC incluye una matriz de interfaces para apoyar la automatización y las necesidades operativas, incluida la interfaz PLC, Modbus TCP/IP, CRI Ethernet, interfaz ROS, una interfaz para cámaras de detección de objetos y una interfaz Cloud. El iguverse, el iRC y los robots relacionados de Igus se han optimizado para satisfacer las necesidades de automatización de bajo coste de las PYMES.
Descargo de responsabilidad: Las opiniones, creencias y puntos de vista expresados por los autores o participantes del foro de este sitio web no reflejan necesariamente las opiniones, las creencias y los puntos de vista de DigiKey o de las políticas oficiales de DigiKey.