

¿Qué es el tiempo muerto del convertidor de potencia y cómo puedo controlarlo?
Los crecientes requisitos de potencia para los automóviles, los pequeños EV (vehículos eléctricos), las herramientas inalámbricas y las estaciones de carga están impulsando el cambio a los sistemas de potencia de 48 voltios. Estos sistemas ofrecen los beneficios de una mayor eficiencia y menores pérdidas, así como un tamaño y peso más pequeños. Todos estos sistemas de potencia convierten la potencia suministrada por el bus de 48 voltios en voltajes utilizables, lo que requiere el uso de convertidores de potencia.
Los convertidores de potencia utilizan técnicas de potencia conmutada para convertir 48 voltios de CC en voltajes seleccionados. Un convertidor típico de 48 voltios, en este caso, el UCC28251PWR de Texas Instruments, se basa en dispositivos con un interruptor de potencia configurados en medio puente, como los FET (transistores de efecto de campo), que se muestran como Q1 y Q2 en la Figura 1. Un controlador de PWM (modulación por ancho de pulsos) controla estos dispositivos para producir y regular el voltaje de salida deseado.
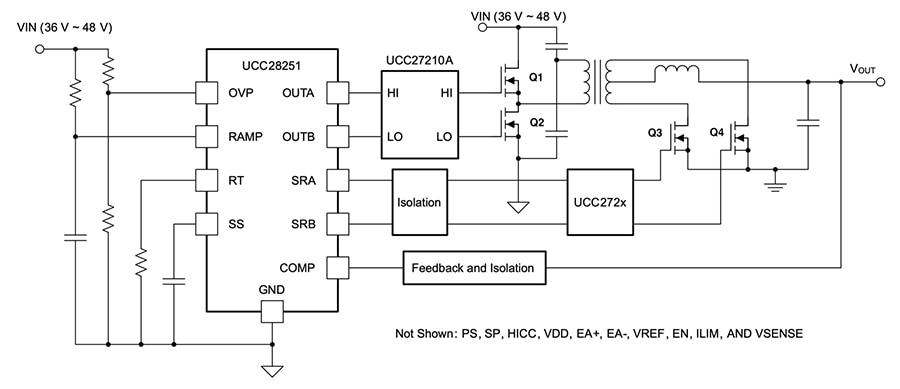 Figura 1: Un convertidor de CC-CC típico utiliza un controlador de PWM para accionar los FET de potencia configurados en medio puente. El controlador ajusta el ancho de pulsos en las entradas del FET para producir y regular el VOUT (voltaje requerido en la salida). (Fuente de la imagen: Texas Instruments)
Figura 1: Un convertidor de CC-CC típico utiliza un controlador de PWM para accionar los FET de potencia configurados en medio puente. El controlador ajusta el ancho de pulsos en las entradas del FET para producir y regular el VOUT (voltaje requerido en la salida). (Fuente de la imagen: Texas Instruments)
En este circuito, los FET, Q1 y Q2, forman una topología de medio puente. Se encienden alternativamente para accionar el transformador. Los FET Q3 y Q4 son rectificadores síncronos que convierten la forma de onda de conmutación de la salida del transformador a la CC. Los rectificadores síncronos eliminan las caídas de voltaje en serie asociadas con los rectificadores semiconductores, lo que mejora la eficiencia. Estos FET rectificadores se deben accionar sincrónicamente con los dispositivos de conmutación de potencia primaria.
Las topologías de inversor alternativas incluyen el puente completo o "H", que utiliza cuatro transistores FET, o el puente completo en cascada de seis transistores FET, que se utiliza para convertidores trifásicos. Todas estas tecnologías utilizan uno o más pares de dispositivos de potencia. Los pares están conectados en serie, como los FET en la Figura 1.
Hay dos cuestiones críticas con cualquiera de estas topologías. La primera es que nunca se puede permitir que el dispositivo de conmutación del lado alto (Q1) y el del lado bajo (Q2) estén encendidos al mismo tiempo. Si eso ocurre, hay un cortocircuito entre el bus de 48 voltios y la conexión a tierra. Esta condición se llama disparo y, por lo general, daña los interruptores de encendido. El disparo se evita controlando los tiempos de conmutación de cada dispositivo de potencia de forma independiente. El objetivo es apagar el dispositivo activo antes de que se encienda el dispositivo inactivo.
El retraso entre los dos eventos (encender y apagar) se llama tiempo muerto primario. Se mide comparando los tiempos de transición del VGS (voltaje de compuerta a fuente) de los FET del lado alto y del lado bajo en el ancho máximo de pulsos del controlador (Figura 2). El retraso entre ambos conjuntos de transiciones es un tiempo muerto.
 Figura 2: El tiempo muerto primario se mide comparando los tiempos de transición del VGS de los FET del lado alto y del lado bajo en el ancho máximo de pulsos del controlador. El retraso entre ambos conjuntos de transiciones es un tiempo muerto. En este ejemplo, es de 1.498 ns y 1.166 ns. (Fuente de la imagen: Art Pini)
Figura 2: El tiempo muerto primario se mide comparando los tiempos de transición del VGS de los FET del lado alto y del lado bajo en el ancho máximo de pulsos del controlador. El retraso entre ambos conjuntos de transiciones es un tiempo muerto. En este ejemplo, es de 1.498 ns y 1.166 ns. (Fuente de la imagen: Art Pini)
En la Figura 2, el retraso entre el apagado del VGS LO (del lado bajo) del FET y el encendido del VGS Hi (del lado alto) del FET es de 1.498 ns. La otra condición es que, donde el FET del lado alto se apaga y el FET del lado bajo se enciende, hay un retraso de 1.166 ns. Si ambos retrasos medidos son positivos, el tiempo muerto es aceptable. Tenga en cuenta que esta medición se realiza en el ancho máximo de pulsos de la salida del controlador de PWM.
Durante el tiempo muerto, ninguno de los dispositivos está funcionando; esto constituye una pérdida de tiempo muerto. Como todas las pérdidas, es cada vez más importante mantenerlas al mínimo.
Una segunda cuestión crítica es coordinar el funcionamiento de los rectificadores síncronos con las operaciones de conmutación primaria.
El controlador UCC28251PWR que se muestra en la Figura 1 puede controlar circuitos de medio puente o de puente completo, y proporciona tanto las señales de accionamiento de compuerta como las salidas del rectificador síncrono con retrasos programables. El UCC28251PWR controla el tiempo muerto del lado primario y también incluye protección de sobrecorriente de ciclo a ciclo. Los retrasos entre las salidas primarias y las señales de accionamiento del rectificador síncrono secundario, que se denominan tiempo muerto secundario, se pueden programar de forma independiente mediante dos resistencias externas.
El controlador de PWM se utiliza junto con un IC (circuito integrado) de accionamiento de compuerta de medio puente del lado primario, el UCC27210DDAR de Texas Instruments. Este CI controla ambas entradas de la fuente de compuerta de los dos FET de canal N en esta configuración de medio puente. Afecta al tiempo muerto primario debido a su retraso de propagación inherente, que es de 18 ns (típico). El problema del retraso de propagación se minimiza haciendo coincidir el retraso entre ambas salidas de accionamiento de compuerta. El CI del controlador de compuerta UCC27210DDAR tiene sus salidas emparejadas dentro de 2 ns. Se utiliza un controlador de compuerta de la misma familia con características de temporización similares para accionar los FET rectificadores síncronos.
Conclusión
Pasar a sistemas de 48 voltios tiene ventajas inherentes con respecto a la eficiencia, el tamaño y el peso, pero los diseñadores deben comprender la causa del tiempo muerto y cómo minimizarlo. Como se muestra, los CI de propósito especial están disponibles con las funciones necesarias para salvaguardar el funcionamiento de los convertidores de potencia de 48 voltios. Controlan los tiempos muertos primarios y secundarios, lo que elimina los principales problemas posibles de las topologías de circuito de medio puente y puente completo.
Información sobre el autor

Arthur (Art) Pini es un autor que contribuye DigiKey. Tiene una Licenciatura en Ingeniería eléctrica de la City College of New York, y un Máster en ingeniería eléctrica de la City University of New York. Tiene más de 50 años de experiencia en electrónica y ha trabajado desempeñando funciones de ingeniería y marketing en Teledyne LeCroy, Summation, Wavetek y Nicolet Scientific. Le interesa la tecnología de medición y tiene experiencia con los osciloscopios, analizadores de espectro, generadores de formas de onda arbitrarias, digitalizadores y medidores de potencia.

Have questions or comments? Continue the conversation on TechForum, Digi-Key's online community and technical resource.
Visit TechForum and the INTERNET350U Desktop UPS (right)")




