

Motores para fabricantes: Parte 1: El kit Adafruit resuelve el problema de la cabeza móvil
Tengo que admitir que actualmente me encuentro en apuros. Esto se debe a que he decidido agregar movimiento a un par de mis proyectos de pasatiempo, pero soy un poco novato en lo que respecta a seleccionar e implementar los diversos tipos de motores y actuadores que están disponibles. Tampoco conozco los detalles para determinar cosas tales como el par de torsión, las relaciones de transmisión y otros elementos de este tipo.
Cuando me miro por el espejo retrovisor de la vida, recuerdo haber tenido clases sobre este tipo de cosas como parte de mi carrera universitaria. Sin embargo, esto fue hace más de 40 años, a fines de la década de los setenta, que solíamos llamar la edad oscura. Estoy bastante seguro de que mis profesores me enseñaron todo tipo de cosas útiles, pero me temo que mis pequeñas células grises no están haciendo un buen trabajo.
Como siempre digo: “Muéstrenme un led parpadeante y les mostraré un hombre babeando”. Pueden llamarme anticuado si quieren. Por lo tanto, el primero de mis proyectos de pasatiempo consiste en la cabeza de un robot con ledes tricolores en los ojos. Cuando comencé, buscaba crear una plataforma asequible y llena de diversión (algunos pueden llamarla precipitada y desagradable) para jugar, así que simplemente improvisé algo con madera y cartón, todo unido con pegamento caliente.
Durante un tiempo, todo era bueno y justo en el mundo de Max (donde las mariposas son más grandes, las flores son más brillantes y los pájaros cantan más dulcemente). Sin embargo, uno de mis amigos luego dijo que las cosas serían aún más geniales si agregaba movimiento a los procedimientos. Específicamente, sugirió que los ojos giraran de un lado al otro y se ladearan hacia adelante y atrás. Además, que toda la cabeza pudiera girar, ladearse e inclinarse de un lado al otro.
Todo esto nos remite al hecho de que mi cabeza no funciona a la hora de elegir entre los distintos tipos de motores y actuadores disponibles. Me daré algo de crédito por comprender las diferencias de alto nivel entre los motores de CC con escobillas, los motores trifásicos sin escobillas, los motores paso a paso, los servos y los actuadores lineales, pero no estoy tan al tanto de cuáles usar para diversas aplicaciones, como la cabeza de un robot.
Inicio con los servos
Todo esto va a requerir un poco de investigación, lo que sin dudas dará lugar a un futuro blog. Mientras tanto, para tener algo con lo que empezar a jugar, acabo de hacer un pedido de dos minikits de robótica de giro/inclinación modelo 1967 de Adafruit (Figura 1).
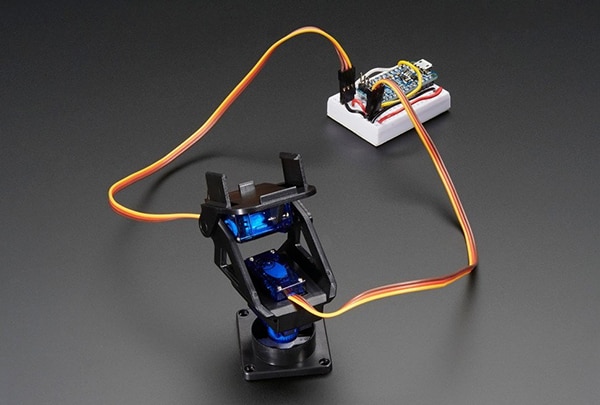 Figura 1: El kit de giro e inclinación modelo 1967 se suministra completamente ensamblado y está equipado con dos microservos (tipo SG-90 o SG-92) que le permiten girar 180° de un lado al otro e inclinarse 150° hacia arriba y abajo. (Fuente de la imagen: Adafruit)
Figura 1: El kit de giro e inclinación modelo 1967 se suministra completamente ensamblado y está equipado con dos microservos (tipo SG-90 o SG-92) que le permiten girar 180° de un lado al otro e inclinarse 150° hacia arriba y abajo. (Fuente de la imagen: Adafruit)
Ahora sé que puedo usar la PWM (modulación por ancho de pulsos) para controlar estos servos directamente con los pines de salida digital de un microcontrolador, pero siempre he preferido mantener alguna forma de aislamiento entre el microcontrolador y el mundo exterior, incluso si ese aislamiento es poco más que un FET (transistor de efecto de campo).
Suponiendo que decida usar servomotores en la implementación final, con el correr del tiempo necesitaré controlar al menos dos servos en cada ojo y al menos tres o cuatro servos en la cabeza principal. Por lo tanto, decidí invertir en una de las placas del controlador de PWM de 16 canales y 12 bits 815 de Adafruit (Figura 2).
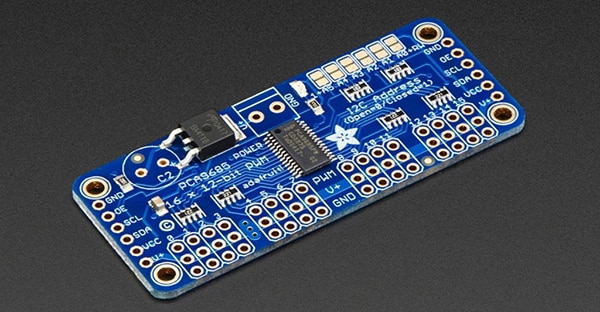 Figura 2: Mediante su interfaz I2C, que utiliza solo dos pines de microcontrolador, esta placa de PWM de 16 canales se puede utilizar para controlar tanto ledes como servomotores. (Fuente de la imagen: Adafruit)
Figura 2: Mediante su interfaz I2C, que utiliza solo dos pines de microcontrolador, esta placa de PWM de 16 canales se puede utilizar para controlar tanto ledes como servomotores. (Fuente de la imagen: Adafruit)
Lo bueno de esta placa es que se controla mediante una interfaz I2C que, por lo tanto, requiere solo dos de los pines de salida digital del microcontrolador. Cada una de las 16 salidas de PWM se puede utilizar para controlar un led o un servomotor.
Motores de CC sin escobillas
Por algún extraño capricho del destino, recientemente también empecé a considerar otro proyecto que requiere conocimientos de motores. Todo esto comenzó hace tres o cuatro años, cuando un amigo me regaló un increíble condensador variable de antaño (Figura 3).
 Figura 3: Este condensador variable utiliza un conjunto de placas metálicas para formar el estátor fijo, entrelazado con un segundo conjunto de placas que forman el rotor móvil, con aire como el dieléctrico. (Fuente de la imagen: Max Maxfield)
Figura 3: Este condensador variable utiliza un conjunto de placas metálicas para formar el estátor fijo, entrelazado con un segundo conjunto de placas que forman el rotor móvil, con aire como el dieléctrico. (Fuente de la imagen: Max Maxfield)
Acabo de hacer una búsqueda rápida en Google mientras nadie miraba y descubrí que el condensador variable con dieléctrico de aire fue inventado por el ingeniero húngaro Dezső Korda, quien recibió una patente alemana por su invento en 1893.
Este dispositivo, que ocupa una región cúbica de aproximadamente 30 x 30 x 30 centímetros (cm), es agradable a la vista. La estructura principal está formada por diferentes metales, y las estructuras que forman el condensador están aisladas eléctricamente del marco mediante separadores de vidrio aislante. No sé si todavía los fabrican (lo dudo), pero si lo hacen, tiemblo al pensar cuánto costaría uno nuevo.
Antes de regalármelo, mi amigo había montado el condensador en una base de madera (que tengo planeado cambiar por algo más espectacular), había quitado los topes para que pueda girar continuamente a 360° y le había agregado un motor y una correa de transmisión (que se ve en la parte inferior derecha de la foto).
Me avergüenza decir que esta belleza deslumbrante ha pasado los últimos años encima de una de las estanterías de mi oficina acumulando polvo. Lo miré hace un par de semanas y pensé: “Realmente debería hacer algo con eso”.
Para ser honesto, no pensé que esto iba a ser un gran problema hasta que miré en el interior del motor y observé que tenía tres cables. “Dios mío”, pensé. Llamé a mi amigo y me confirmó que se trata de un motor trifásico sin escobillas de 12 voltios. Dice que usó este tipo de motor porque es extremadamente imperceptible, tanto auditiva como eléctricamente. Así que ahora, necesito encontrar alguna manera de controlar la velocidad y la dirección de rotación de este pequeño diablillo.
Conclusión
Conociendo la forma en la que suelo dedicarme a las cosas y apostando a que el movimiento desempeñará un papel en más proyectos de pasatiempo futuros, comenzaré a aprender más sobre motores y actuadores. El kit de giro e inclinación modelo 1967 de Adafruit y la placa de PWM 817 resultaron muy útiles para comenzar, y lo más probable es que lo sean en proyectos futuros.
También acabo de encargar el libro Motors for Makers: A Guide to Steppers, Servos, and Other Electrical Machines (Motores para fabricantes: una guía para motores paso a paso, servos y otras máquinas eléctricas) de Matthew Scarpino.
Brindaré más información en un próximo blog. Mientras tanto, ¿hay algo que quisieran compartir? Como siempre, agradezco sus comentarios, preguntas y sugerencias.
Información sobre el autor

Clive "Max" Maxfield received his BSc in Control Engineering in 1980 from Sheffield Hallam University, England and began his career as a designer of central processing units (CPUs) for mainframe computers. Over the years, Max has designed everything from silicon chips to circuit boards and from brainwave amplifiers to steampunk Prognostication Engines (don't ask). He has also been at the forefront of Electronic Design Automation (EDA) for more than 30 years.
Max is the author and/or co-author of a number of books, including Designus Maximus Unleashed (banned in Alabama), Bebop to the Boolean Boogie (An Unconventional Guide to Electronics), EDA: Where Electronics Begins, FPGAs: Instant Access, and How Computers Do Math. Check out his “Max’s Cool Beans” blog.

Have questions or comments? Continue the conversation on TechForum, Digi-Key's online community and technical resource.
Visit TechForum




