Selección de tecnologías de sensores de proximidad y distancia
Colaboración de Editores de DigiKey de América del Norte
2024-09-18
El uso de sensores de proximidad y distancia para detectar la presencia y la ubicación de elementos sin contacto físico puede ser un aspecto importante del control de procesos industriales como la manipulación de materiales, la maquinaria agrícola, las operaciones de fabricación y montaje, y el envasado de alimentos, bebidas y productos farmacéuticos.
Estos sensores utilizan diversas tecnologías, como la fotoeléctrica, láser, inductiva, capacitiva, magnética y ultrasónica. A la hora de determinar cuál es la mejor opción para una aplicación determinada, hay que tener en cuenta factores como el alcance, el tamaño, la precisión, la sensibilidad, la resolución y el costo.
Un factor clave en muchas aplicaciones es el material del objeto a detectar. Algunos sensores se comportan de forma diferente con superficies duras que con superficies fibrosas, y otros sensores pueden verse afectados por el color o la reflectividad del objeto.
En este artículo se revisan las tecnologías de sensores de proximidad sin contacto más comunes, se examina su funcionamiento, sus características básicas de rendimiento y los sensores ejemplares de SICK, junto con algunas aplicaciones previstas.
Sensores fotoeléctricos
Los sensores fotoeléctricos, como los sensores de proximidad fotoeléctricos W10 de SICK, son fáciles de usar e instalar y están disponibles con una serie de Características adecuadas para numerosas aplicaciones. El resistente diseño de los sensores W10 los hace adecuados para la detección precisa de objetos en entornos difíciles. La pantalla táctil integrada acelera la parametrización y el despliegue de los sensores (Figura 1).
 Figura 1: La pantalla táctil de estos sensores fotoeléctricos puede agilizar la puesta en marcha y la implementación. (Fuente de la imagen: SICK)
Figura 1: La pantalla táctil de estos sensores fotoeléctricos puede agilizar la puesta en marcha y la implementación. (Fuente de la imagen: SICK)
Los teach-ins disponibles permiten a los diseñadores adaptar estos sensores a los requisitos específicos de cada aplicación. Además, las funciones integradas, como los ajustes de velocidad, los modos de medición estándar y de precisión, y la supresión de primer y segundo plano, permiten utilizar un solo sensor en una gran variedad de aplicaciones. La serie de sensores incluye cuatro variantes, que difieren en sus distancias de funcionamiento y opciones de montaje.
Supresión de fondo
Los sensores de proximidad fotoeléctricos con supresión de fondo (BGS) utilizan la triangulación entre los elementos emisores y receptores. Se suprimen las señales de los objetos situados detrás del alcance de detección establecido. Además, la tecnología BGS de SICK ignora los objetos altamente reflectantes del fondo y puede manejar condiciones de iluminación ambiental difíciles.
La supresión del fondo es especialmente útil cuando el objeto objetivo y el fondo (como una cinta transportadora) tienen una reflectividad similar o si la reflectividad del fondo es variable y puede causar interferencias en la detección.
Supresión del primer plano
Los sensores fotoeléctricos de proximidad con supresión de primer plano (FGS) pueden detectar objetos a una distancia definida. Se detectan todos los objetos situados entre el sensor y la distancia de detección (fijada en el fondo). Para garantizar una detección fiable, el fondo debe ser relativamente luminoso y no debe variar en altura.
Cuando los objetos se encuentran sobre una superficie reflectante, como una cinta transportadora blanca o de color claro, la supresión del primer plano puede mejorar la detección. En lugar de detectar la luz reflejada por el objeto, el sensor detecta el objeto por la ausencia de luz reflejada por la cinta transportadora.
Catadióptrico
En un sensor catadióptrico, la luz emitida incide en un reflector y la luz reflejada es evaluada por el sensor. Los errores pueden minimizarse utilizando filtros polarizadores. Los films estirables y los envoltorios de plástico transparentes pueden interferir con estos sensores. Reducir la sensibilidad de los sensores puede ayudar a superar estos retos. Además, la sustitución de los emisores de luz infrarroja estándar por láseres puede permitir rangos de detección más largos y una mayor resolución.
El rendimiento de los sensores catadióptricos puede mejorarse utilizando una histéresis de conmutación inferior a la normal. En estos diseños, se puede detectar con fiabilidad incluso una atenuación mínima de la luz entre el sensor y el reflector, por ejemplo, la causada por las botellas de vidrio. SICK también ofrece un sistema de supervisión denominado AutoAdapt que regula y adapta continuamente el umbral de interruptor en respuesta a la acumulación gradual de contaminación que podría provocar el fallo del sistema de detección.
Haz pasante
A diferencia de los sensores catadióptricos, los sensores de barrera utilizan dos dispositivos activos: un emisor y un receptor. La detección a través del haz permite mayores alcances de detección. La sustitución de los emisores IR por diodos láser puede mejorar aún más la distancia de detección, manteniendo al mismo tiempo una alta resolución y una detección precisa.
Fibra óptica
Los sensores de fibra óptica son una variante de los de haz pasante. En un sensor fotoeléctrico de fibra óptica, el emisor y el receptor están empaquetados en un único receptáculo. El emisor y el receptor utilizan cables de fibra óptica independientes. Estos sensores son especialmente adecuados para su uso en aplicaciones de alta temperatura y en entornos peligrosos y difíciles.
Matrices de sensores fotoeléctricos
La familia de sensores fotoeléctricos RAY26 Reflex Array, como el modelo 1221950, permite una detección fiable de objetos planos, así como una rápida puesta en servicio. Cuando se combinan con un reflector, los sensores fotoeléctricos también detectan objetos pequeños, planos, transparentes o irregulares de hasta 3 mm. Dentro de una matriz de luz uniforme de 55 mm de altura, los sensores detectan el borde de ataque del objeto. Esto significa que incluso los objetos perforados pueden detectarse de forma fiable sin necesidad de complejos interruptores (figura 4).
 Figura 2: Las matrices de sensores fotoeléctricos pueden detectar objetos de hasta 3 mm en un campo de 55 mm de altura. (Fuente de la imagen: SICK)
Figura 2: Las matrices de sensores fotoeléctricos pueden detectar objetos de hasta 3 mm en un campo de 55 mm de altura. (Fuente de la imagen: SICK)
Sensores láser de distancia
Los diseñadores de aplicaciones como la supervisión del nivel en contenedores de almacenamiento, la detección de la posición de objetos en cintas transportadoras, la posición XY del eje en sistemas automatizados de carretillas elevadoras, el posicionamiento vertical de grúas en almacenes y transportadores aéreos, y la supervisión del diámetro durante el bobinado de bobinas pueden recurrir a los sensores de distancia láser DT50. Estos sensores admiten mediciones de distancia en tiempo de vuelo (ToF) de hasta varios medidores utilizando luz láser reflejada para proporcionar inmunidad a la iluminación ambiental y un funcionamiento preciso y fiable.
Por ejemplo, el DT50-2B215252 tiene un alcance de 200 a 30,000 mm y varias características especiales, entre ellas:
- Carcasa resistente con grado de protección IP65 e IP67
- Puede proporcionar hasta 3000 mediciones de distancia por segundo
- Tiempo de respuesta mínimo de 0.83 ms
- La carcasa compacta admite una amplia gama de aplicaciones, desde robots industriales hasta la medición de la altura de llenado de contenedores de almacenamiento.
Mediciones de alta resolución mediante estadísticas
La medición de distancia de alta definición plus (HDDM+) es una tecnología de medición ToF de alta resolución que puede utilizarse en sensores láser de distancia y de detección y alcance de luz (LiDAR). A diferencia de las tecnologías de detección monopulso o de correlación de fases, HDDM+ es un proceso de medición estadístico.
El software del sensor evalúa estadísticamente los ecos de múltiples pulsos láser para filtrar las interferencias de fuentes como cristales, niebla, lluvia, polvo, nieve, hojas, vallas y otros objetos, con el fin de calcular la distancia al objetivo previsto. La medición de la distancia resultante puede tener un alto nivel de certeza incluso en condiciones ambientales difíciles (Figura 5).
 Figura 3: El software HDDM+ de SICK utiliza un proceso de evaluación estadística para eliminar el "ruido" de elementos como cristales, niebla, lluvia, polvo, nieve, hojas y vallas. (Fuente de la imagen: SICK)
Figura 3: El software HDDM+ de SICK utiliza un proceso de evaluación estadística para eliminar el "ruido" de elementos como cristales, niebla, lluvia, polvo, nieve, hojas y vallas. (Fuente de la imagen: SICK)
Las aplicaciones típicas de la tecnología HDDM+ son la medición de distancias para el control de calidad en la producción electrónica, la detección multidimensional de objetos con LiDAR y la determinación de la posición en ingeniería mecánica y de instalaciones, así como la determinación de la posición de grúas o vehículos industriales.
El alcance de detección de los sensores HDDM+ es de hasta 1.5 km en cinta retrorreflectante. Por ejemplo, el modelo DT1000-S11101 tiene un alcance de hasta 460 m con una precisión de medición típica de ±15 mm para objetos naturales y una resolución ajustable de 0.001 a 100 mm.
Inductivo
Los sensores de proximidad inductivos como los de la serie IME de SICK pueden detectar objetos metálicos ferrosos y no ferrosos. Estos sensores constan de un circuito resonante inductor-condensador (LC) que genera un campo electromagnético alterno de alta frecuencia. El campo se amortigua cuando un objeto metálico entra en el campo de detección. La amortiguación es detectada por el circuito de evaluación de la señal y un amplificador que produce la señal de salida (figura 4).
 Figura 4: Un sensor de proximidad inductivo básico consta de un circuito LC que produce un campo alterno, un evaluador de señal y un amplificador. (Fuente de la imagen: SICK)
Figura 4: Un sensor de proximidad inductivo básico consta de un circuito LC que produce un campo alterno, un evaluador de señal y un amplificador. (Fuente de la imagen: SICK)
Dos especificaciones importantes para la distancia de detección de varias tecnologías de sensores de proximidad son la distancia de detección nominal (Sn) y la distancia de detección garantizada (Sa). Sn no tiene en cuenta las tolerancias de fabricación ni influencias externas como la temperatura de funcionamiento. Sa tiene en cuenta tanto las tolerancias de fabricación como las variaciones en las condiciones de funcionamiento. Sa suele ser aproximadamente el 81% del valor de Sn. Por ejemplo, para el sensor inductivo modelo IME08-02BPSZT0S, Sn es de 2 mm y Sa es de 1.62 mm.
Detección capacitiva
Al igual que los sensores inductivos, los sensores de proximidad capacitivos utilizan un oscilador. En este caso, se utiliza un capacitor abierto en el que el electrodo activo del sensor produce un campo electrostático respecto a tierra. Estos sensores pueden detectar la presencia de una amplia variedad de materiales, incluidos objetos metálicos y no metálicos.
Cuando un objeto entra en el campo electrostático, la amplitud de las oscilaciones en el circuito resonante cambia en función de las propiedades dieléctricas del material. El evaluador de señales detecta el cambio y un amplificador produce la señal de salida (Figura 5).
 Figura 5: En un sensor de proximidad capacitivo, un circuito oscilante produce un campo electrostático que cambia de características cuando el objetivo a detectar entra en el campo. (Fuente de la imagen: SICK)
Figura 5: En un sensor de proximidad capacitivo, un circuito oscilante produce un campo electrostático que cambia de características cuando el objetivo a detectar entra en el campo. (Fuente de la imagen: SICK)
Al igual que los sensores de proximidad inductivos, existen varias especificaciones relacionadas con la distancia de detección de los sensores de proximidad capacitivos, como Sn, Sa y un factor de reducción. Por ejemplo, el modelo CM12-08EBP-KC1 tiene un Sn de 8 mm y un Sa nominal de 5,76 mm.
El objeto a detectar debe ser al menos tan grande como la cara del sensor y la distancia de detección varía con el factor de reducción del material. Los factores de reducción están relacionados con la constante dieléctrica del material y pueden variar de 1 para los metales y el agua a 0,4 para el Cloruro de polivinilo (PVC), 0.6 para el vidrio y 0.5 para la cerámica.
Accionadores
Los sensores magnéticos de proximidad responden a la presencia de un imán. Los sensores magnéticos de proximidad de SICK utilizan dos tecnologías de detección:
- Los sensores magnetorresistivos gigantes (GMR) se basan en resistencias que cambian su valor en presencia de un campo magnético. Se utiliza un puente de Wheatstone para detectar el cambio de resistencia y producir una señal de salida. Los sensores para cilindros MZT7, como el MZT7-03VPS-KP0 diseñado para su uso con cilindros de ranura en T, utilizan la tecnología GMR para detectar el posicionamiento del pistón en accionamientos neumáticos y en aplicaciones similares.
- La tecnología LC utiliza un circuito resonante que resuena con una amplitud pequeña. Si se acerca un campo magnético externo, la amplitud resonante aumenta. El aumento es detectado por un evaluador de señal y un amplificador produce la señal de salida (Figura 6). El MM08-60APO-ZUA tiene un Sn de 60 mm y un Sa de 48.6 mm.
 Figura 6: En un sensor de proximidad magnético, la sonda de campo puede utilizar la tecnología GMR o LC. (Fuente de la imagen: SICK)
Figura 6: En un sensor de proximidad magnético, la sonda de campo puede utilizar la tecnología GMR o LC. (Fuente de la imagen: SICK)
Sensores ultrasónicos
Para objetos situados a una distancia de hasta 8 m, los diseñadores pueden recurrir a sensores ultrasónicos como la familia UM30 de SICK. Estos sensores disponen de compensación de temperatura integrada para mejorar la precisión de las mediciones y ofrecen detección de objetos independiente del color, inmunidad al polvo y funcionamiento hasta +70 °C. Miden las distancias basándose en la tecnología del tiempo de vuelo, en la que la distancia es igual a la velocidad del sonido multiplicada por el tiempo acústico total de vuelo (t2) con el total dividido por 2 (figura 6).
 Figura 7: Los sensores ultrasónicos pueden medir la distancia en función del tiempo total de vuelo (t2) de las ondas sonoras. (Fuente de la imagen: SICK)
Figura 7: Los sensores ultrasónicos pueden medir la distancia en función del tiempo total de vuelo (t2) de las ondas sonoras. (Fuente de la imagen: SICK)
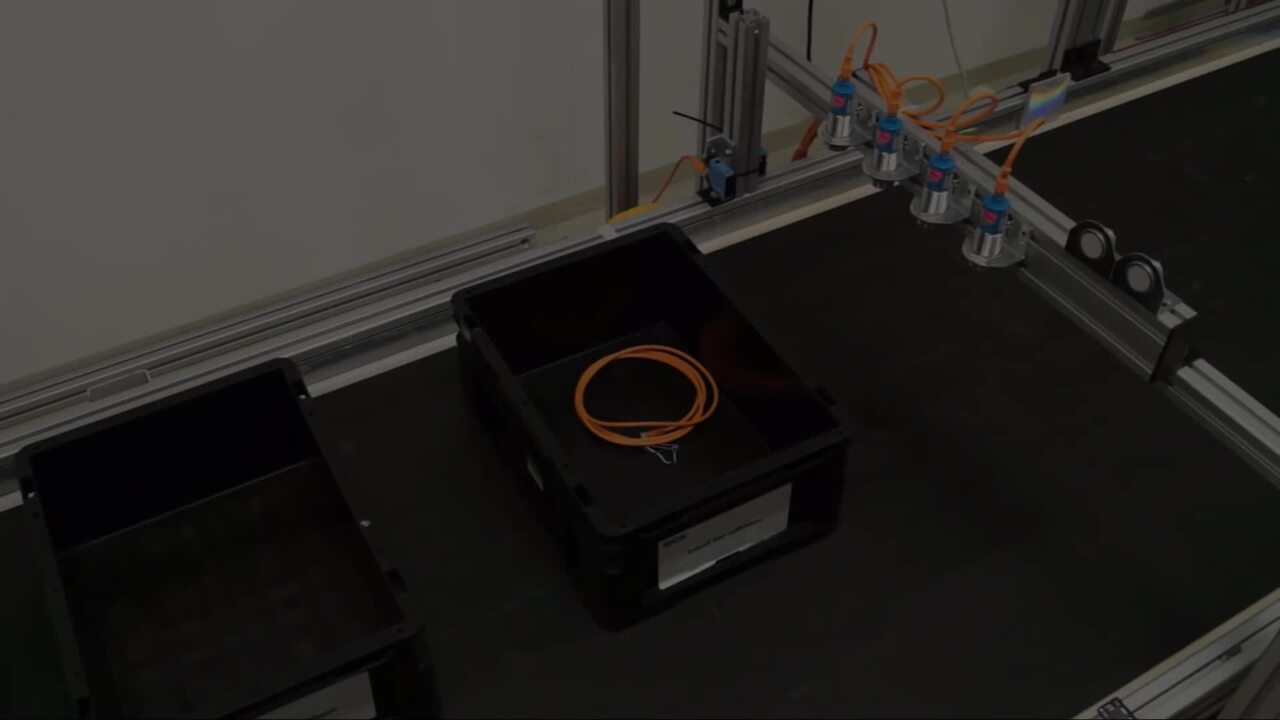
Los sensores ultrasónicos como el modelo UM30-212111 son adecuados para aplicaciones como la supervisión de contenedores vacíos. Un monitor interno de temperatura produce una precisión de medición de ±1%. Estos sensores independientes del color pueden detectar objetos difíciles de distinguir incluso en presencia de suciedad y polvo.
Conclusión:
La buena noticia es que existe un amplio rango de opciones de tecnología de sensores de proximidad y distancia. Esto significa que hay una solución para cada requisito de aplicación. El reto consiste en clasificar las numerosas opciones y encontrar la solución óptima para la detección de materiales específicos en condiciones reales de aplicación y funcionamiento.
Descargo de responsabilidad: Las opiniones, creencias y puntos de vista expresados por los autores o participantes del foro de este sitio web no reflejan necesariamente las opiniones, las creencias y los puntos de vista de DigiKey o de las políticas oficiales de DigiKey.