Mfr Part # STM32F407VGT6J
IC MCU 32BIT 1MB FLASH 100LQFP
STMicroelectronics
License: Attribution Motors ARM mbed
Overview
This project documents the full development of a custom BLDC motor controller PCB, from schematic capture to SMT assembly and testing.
Key Specifications
- MCU: STM32F407VGT6
- Gate driver: DRV8301
- MOSFETs: IRFZ44N x6
- Current sensing: inline shunt resistor
- PCB: 4-layer, 1.6mm FR4, HASL lead-free
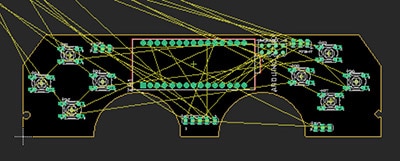
- Design tool: Altium Designer
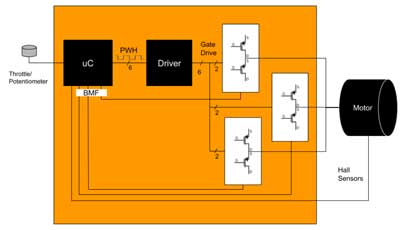
Design Highlights
Power stage uses three half-bridge gate driver circuits with bootstrap capacitors for high-side gate drive. Dead time is configured in firmware to prevent shoot-through.
Current sensing via an inline shunt on each low-side leg feeds into the STM32 ADC. The FOC algorithm runs at 20kHz PWM frequency.
4-layer stackup: Signal / GND / PWR / Signal. A power plane provides a clean reference and low-impedance current path.
MOSFETs are placed on the bottom layer with exposed pads soldered to internal copper pours — no heatsink required up to 8A continuous.
Assembly Process
SMT assembly was performed in-house at our Tianjin facility using a DEK solder paste printer, a Yamaha YSM20 pick-and-place, an 8-zone reflow oven, AOI inspection, and a functional motor load test.
Testing Results
- Motor spins correctly in both directions under FOC control
- Phase current waveform confirmed sinusoidal at 5A load
- Max temperature 52°C at 8A / 24V continuous
- No shoot-through events over a 48h burn-in test
#ifndef __DRV8301_H #define __DRV8301_H #include "stm32f4xx_hal.h" // ==================== 引脚定义(请根据你的硬件修改) ==================== #define DRV8301_CS_GPIO_Port GPIOC #define DRV8301_CS_Pin GPIO_PIN_13 #define DRV8301_EN_GPIO_Port GPIOB #define DRV8301_EN_Pin GPIO_PIN_12 #define DRV8301_FAULT_GPIO_Port GPIOD #define DRV8301_FAULT_Pin GPIO_PIN_2 // ==================== 寄存器地址 ==================== #define DRV_REG_STATUS1 0x00 #define DRV_REG_STATUS2 0x01 #define DRV_REG_CTRL1 0x02 #define DRV_REG_CTRL2 0x03 // ==================== CTRL1 常用配置位 ==================== #define PWM_MODE_6X (1 << 5) // 6x PWM 模式(独立高低边) #define PWM_MODE_3X (0 << 5) #define OCP_RETRY (0 << 10) // 过流自动重试 #define OCP_LATCH (1 << 10) #define GAIN_10 (0 << 0) // 电流放大倍数 10V/V #define GAIN_20 (1 << 0) #define GAIN_40 (2 << 0) // ==================== CTRL2 常用配置位 ==================== #define DEADTIME_100NS (0x0 << 8) // 死区时间 #define DEADTIME_200NS (0x1 << 8) #define DEADTIME_400NS (0x2 << 8) // 常用值 // 函数声明 void DRV8301_Init(void); uint16_t DRV8301_Read(uint8_t addr); void DRV8301_Write(uint8_t addr, uint16_t data); uint16_t DRV8301_ReadStatus1(void); uint16_t DRV8301_ReadStatus2(void); void DRV8301_EnableGate(void); void DRV8301_DisableGate(void); uint8_t DRV8301_CheckFault(void); #endif
#include "drv8301.h"
#include <stdio.h> // 用于串口打印(可选)
extern SPI_HandleTypeDef hspi3; // CubeMX 生成的 SPI 句柄(改成你的)
// ==================== 底层 SPI 传输 ====================
static uint16_t drv8301_transfer(uint16_t txdata)
{
uint8_t tx[2] = {(txdata >> 8) & 0xFF, txdata & 0xFF};
uint8_t rx[2] = {0};
HAL_GPIO_WritePin(DRV8301_CS_GPIO_Port, DRV8301_CS_Pin, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&hspi3, tx, rx, 2, HAL_MAX_DELAY);
HAL_GPIO_WritePin(DRV8301_CS_GPIO_Port, DRV8301_CS_Pin, GPIO_PIN_SET);
return (rx[0] << 8) | rx[1];
}
// ==================== 读寄存器 ====================
uint16_t DRV8301_Read(uint8_t addr)
{
uint16_t cmd = (1 << 15) | ((addr & 0x0F) << 11); // Read bit + 地址
drv8301_transfer(cmd); // 第一次发送命令
return drv8301_transfer(0x0000); // 第二次读取数据
}
// ==================== 写寄存器 ====================
void DRV8301_Write(uint8_t addr, uint16_t data)
{
uint16_t cmd = ((addr & 0x0F) << 11) | (data & 0x07FF); // Write bit=0
drv8301_transfer(cmd);
}
// ==================== 初始化 DRV8301 ====================
void DRV8301_Init(void)
{
// 硬件复位时序
DRV8301_DisableGate();
HAL_Delay(10);
DRV8301_EnableGate();
HAL_Delay(10);
// 配置 Control Register 1(6x PWM + 过流重试 + 10倍增益)
DRV8301_Write(DRV_REG_CTRL1, PWM_MODE_6X | OCP_RETRY | GAIN_10);
// 配置 Control Register 2(死区 400ns)
DRV8301_Write(DRV_REG_CTRL2, DEADTIME_400NS);
printf("DRV8301 初始化完成!\r\n");
}
// ==================== 状态读取 ====================
uint16_t DRV8301_ReadStatus1(void) { return DRV8301_Read(DRV_REG_STATUS1); }
uint16_t DRV8301_ReadStatus2(void) { return DRV8301_Read(DRV_REG_STATUS2); }
// ==================== 使能/关闭栅极驱动 ====================
void DRV8301_EnableGate(void)
{
HAL_GPIO_WritePin(DRV8301_EN_GPIO_Port, DRV8301_EN_Pin, GPIO_PIN_SET);
}
void DRV8301_DisableGate(void)
{
HAL_GPIO_WritePin(DRV8301_EN_GPIO_Port, DRV8301_EN_Pin, GPIO_PIN_RESET);
}
// ==================== 故障检测 ====================
uint8_t DRV8301_CheckFault(void)
{
return HAL_GPIO_ReadPin(DRV8301_FAULT_GPIO_Port, DRV8301_FAULT_Pin) == GPIO_PIN_RESET;
}